Programming the UDS
Resources
Programming the UDS
Now that you've attached the ultrasonic distance sensor (UDS), you need to test that it can detect objects that are directly in front of it at different distances.
Testing the UDS
First, you need to check that the UDS is working correctly while the robot is stationary. To interact with the UDS, you will be using the GPIO Zero library.
Setting up the program
1. In a new Python 3 file, import the libraries required for this program.
from gpiozero import InputDevice, OutputDevice
from time import sleep, time
InputDevice and OutputDevice will be used to communicate with the trig and echo pins. You will also need time and sleep to calculate the time taken for the ultrasound to be emitted and received.
2. Set up the trig and echo pins using the GPIO pins you connected them to on your Raspberry Pi. I used pins 4 and 17 respectively, but you may have used different pins.
trig = OutputDevice(4)
echo = InputDevice(17)
sleep(2)
The sleep(2) is there to let the sensor settle when the program starts, so that the readings are accurate.
Transmitting and receiving the ultrasound
3. Create a function that will be used to calculate how long it takes for the ultrasound to be transmitted and received i.e. one pulse.
Initialise the variables for storing the start and end duration of a pulse. Then set the trig pin to high for 10μs (microseconds), which prepares the internal clock of the UDS.
def get_pulse_time():
pulse_start, pulse_end = 0, 0
trig.on()
sleep(0.00001)
trig.off()
As soon as the trig pin is set to low, a burst of ultrasound is sent from the emitter, and this sound starts to travel through the air.
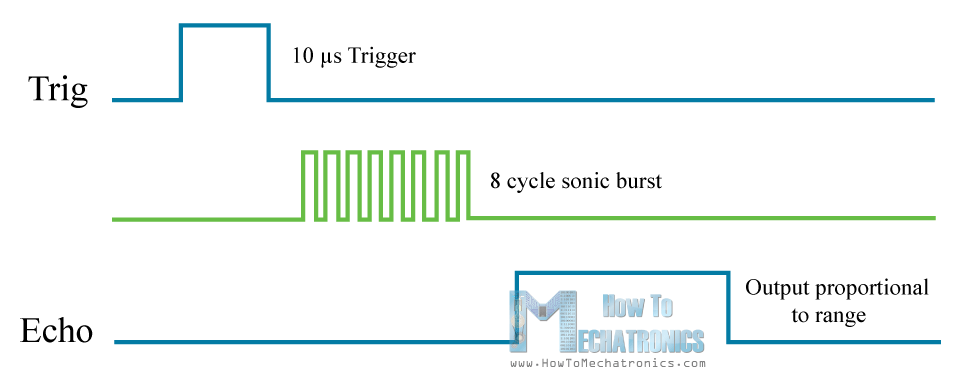
Once the ultrasound has finished being emitted, the UDS sets the echo pin to high. At this point, you need to record the start time.
4. Use a while loop inside the function to record the start time.
while echo.is_active == False:
pulse_start = time()
You can use the is_active command to check if a pin is set to high (which returns True) or low (which returns False).
The above code works by repeatedly replacing the value of pulse_start with the current time until the echo pin is active. This means that the final value of pulse_start is the time at which the echo pin is set to high.
If the ultrasound hits an object, it is reflected back to the sensor. As soon as the receiver picks up the ultrasound, the echo pin is set to low and the program must record the end time.
5. Inside the function, create another while loop that keeps replacing the end time until the echo pin is set to low.
while echo.is_active == True:
pulse_end = time()
6. Finally, the function should return the amount of time it took for the pulse of ultrasound to be sent and received.
return pulse_end - pulse_start
All of the code from steps 3 to 6 should be inside the function you created called get_pulse_time().
7. Test the program by running it and then typing the following into the Python shell (known as the REPL if you are using Mu).
print(get_pulse_time())
Try typing the above line of code when your hand is at different distances from the front of the UDS. You should get smaller values as your hand approaches the sensor.
Calculating the distance
You can use a formula to calculate the distance the sensor is from an object, starting with the speed equation:

This can be rearranged to make:

but as the sound has to travel to the object and back, you need to divide this distance by 2:

The speed of sound in air will vary depending on the conditions, but it tends to hover at around 343 metres per second.
Putting the formula into practice
8. Create another function to calculate the distance.
def calculate_distance(duration):
speed = 343
distance = speed * duration / 2
# calculate distance in metres
return distance
Using a different function to calculate this distance is good coding practice, as this function can be tested separately, and can easily be reused multiple times within the program.
9. Add an infinite loop to the bottom of the program to test that everything works.
while True:
duration = get_pulse_time()
distance = calculate_distance(duration)
sleep(0.06)
print(distance)
You need the sleep command, as the UDS requires a short wait before it can be used again.
The final program
Your full code should now look similar to this finished program.
10. Run your code and you should see a stream of numbers showing you the distance of an object from the sensor in metres. Test this by moving a large, flat object such as a book closer to and further from the distance sensor.
Testing the distances
What range of values is your program outputting?
What happens if you place an object really close to, or far away from, the UDS?
Share your answers in the comments below.